

پروژه کنترل بهینه | شبیه سازی مقاله LQ control design of a class of hyperbolic PDE systems: Application to fixed-bed reactor
29 مرداد 1396
کنترل ردیاب بهینه بر روی ربات عمود پرواز چهار ملخه
29 مرداد 1396


پروژه کنترل بهینه | مقاوم سازی کنترلر LQR با روش دسته صفحات
شبیه سازی مقاله
A Control Method to Make LQR Robust: A Planes Cluster Approaching Mode
سال انتشار: 2014
مناسب برای ارائه به عنوان
پروژه آموزشی کنترل بهینه
به همراه
- فایل گزارش پروژه در فرمت ورد
- و شبیه سازی در متلب MATLAB
- و پاورپوینت ارائه
۳۹۹,۰۰۰ تومان
بنابر اصل مینیمم پونتریاگین کنترلر LQR کنترلر بهینه برای کمینه کردن تابع هزینه مربعی است.
برای حل کردن مساله از معادلات ریکاتی دیفرانسیلی (MDRE) یا جبری (MARE) استفاده میکنیم. حل مزبور میتواند برای مساله های رگولاسیون حالت، رگولاسیون خروجی و تعقیب سیگنال مورد استفاده گیرد. اگرچه این روش برای سیستم خطی و مقادیر دقیق پارامترها، بهترین راهحل ممکن است ولی در حضور عدم قطعیت در مقدار پارامترها و یا اغتشاشات خارجی دیگر کنترلر بهینه نیست و شاید حتی پایدار نیز نباشد.
برای حل مشکل فوق در این مقاله یک روش مقاومسازی ارائه میشود که برپایه سیستمهای با ساختار متغیر (VSS) است که اخیرا در بسیاری از صنعتها کاربردهایش افزایش بسیاری داشتهاند. روش سیستم با ساختار متغیر استفاده شده در این مساله «مد خوشه ی صفحات» (PCAM) نام دارد که طراحی آن با طراحی کنترلر مد لغزشی متفاوت میباشد. بعلاوه در صورت وجود اغتشاشات معادل، با استفاده از روش تابع لیاپانوف کنترلرهای مناسب برای سیستم LTI و LTV میتواند مورد استفاده قرار گیرد. به روش ساخته شده در این مقاله به اختصار RLQR به معنای رگولاتور مربعی خطی مقاوم میگوییم. بهبود عملکرد صورت پذیرفته با این کنترلر نیز در مقابل روش LQR و روش SMC نیز در ادامه نشان داده خواهد شد.
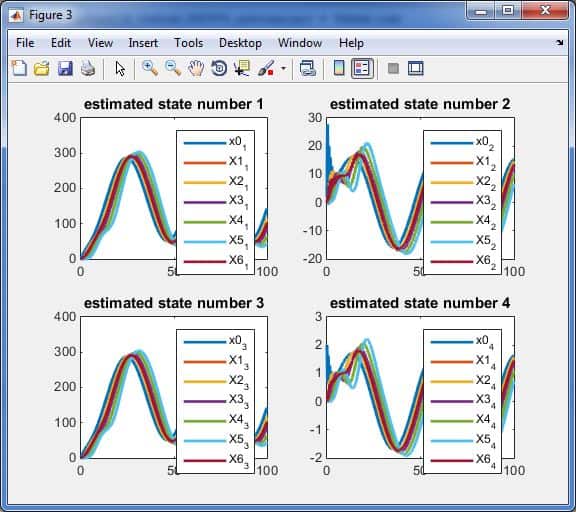
در بخش دوم مقاله ایده اولیه طراحی فوق ارائه میشود. در بخش سوم نیز بررسی عمیق طراحی کنترلر بررسی خواهد شد و پایه تئوری لازم گفته میشود. در بخش چهارم شبیهسازی و نتایج آن ارائه میشود و در انتها نیز نتیجه گیری و معرفی کارهای آتی انجام میپذیرد.
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.