

کنترل بهینه یک سیستم MIMO روتور دوقلو به روش LQR با انتگرالگیر
31 مرداد 1396
طراحی کنترلر تطبیقی برای سیستم غیرخطی مرتبه یک با بروزرسانی مبتنی بر پایداری لیاپانوف
2 شهریور 1396
تمرین باله روی صحنه – ادگار دگا – ۷۰۵۲
اندازه: ۷۰۵۲
۵۸۹,۰۰۰ تومان
طراحی کنترلر PID تطبیقی، برای سیستم های غیرخطی به وسیله شبکه عصبی فازی
بر اساس مقاله زیر
فهرست مطالب
فصل 1- مقدمه… 2
فصل 2- کنترل کننده PID.. 3
2-1- معرفی کنترل کننده 3
2-2- محدودیت های فیزیکی.. 3
فصل 3- سیستم عصبی- فازی و آموزش آن.. 4
3-1- معرفی سیستم فازی.. 4
3-2- نحوه آموزش سیستم فازی.. 4
3-3- طریقه استفاده از سیستم فازی در طراحی کنترلر. 5
فصل 4- نحوه آپدیت پارامترهای کنترل کننده PID.. 6
4-1- معرفی کنترل کننده 6
4-2- آپدیت پارامترهای کنترل کننده 6
4-2-1- روش گرادیان نزولی (GD) 6
4-2-2- روش Levenberg-Marquardt(LM) 8
فصل 5- سیستم bioreactor 10
5-1- معرفی سیستم.. 10
5-2- نحوه داده برداری از سیستم.. 10
فصل 6- شبیه سازی.. 11
6-1- کنترل سیستم bioreactor در ناحیه پایدار و ناپایدار 11
6-2- بررسی مقاوم بودن در برابر نویز. 13
6-3- عملکرد سیستم حلقه بسته در برابر تغییرات سریع پارامترها 14
مرجع………….. 16
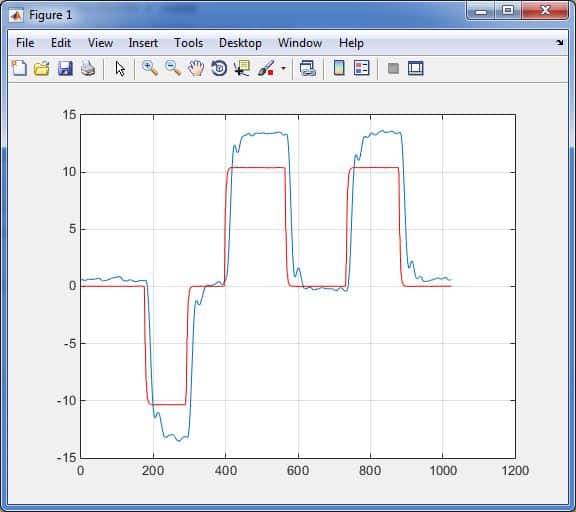
در این پروژه، از یک روش جدید تطبیقی برای طراحی کنترلر کلاسیک PID، برای سیستمهای غیر خطی استفاه میکنیم که طراحی کنترلر PID برای چنین سیستمهایی بسیار مشکل میباشد. این پروژه برگرفته از یک مقاله میباشد که در سال 2014 چاپ شده است. در اینجا طراحی کنترلر اولین هدف نمیباشد، چون این کار بسیار مشکل میباشد. در اینجا یک سیستم فازی طراحی میشود که براساس دادههای ورودی و خروجی سیستم میباشد و مزیت این کار این است که داشتن اولین مدل از سیستم نیاز نمیباشد. پس از طراحی سیستم فازی به عنوان یک شناساگر، کنترلر PID را برای این سیستم فازی طوری طراحی میکنیم که عملکرد مناسبی را داشته باشد. در این روش تطبیقی بودن وقتی خود را نشان میدهد که برای طراحی شناساگر، در بازههای زمانی مختلف متوالی شناساگر بطور مرتب آپدیت شود و در نتیجه پارامترهای کنترلر PID را نیز آپدیت کند.
دراینجا عملکرد سیستم bioreactor را با این روش چک می کنیم که بسیار خوب جواب می دهد. عملکرد این طراحی نشان داده است که در tracking و robust بودن در برابر نویز بسیار خوب عمل میکند. این روش، عملکرد بسیار خوبی در شرایط بسیاربد مانند تغییرات سریع پارامترهای سیستم، نویز و ناپایداری دارد. شماتیک روش به کار برده شده به صورت شکل1-1 میباشد. در این پروژه سعی میشود که این روش را شبیه سازی کنیم و روی سیستم bioreactor که معادلات آن موجود میباشد پیاده سازی کنیم. در فصلهای بعد هر یک از بخشهای سیستم را توضیح خواهیم داد.
محصولات مشابه
-
حل تمرین کتاب کنترل بهینه فرانک لویس
۲۲۹,۰۰۰ تومان -
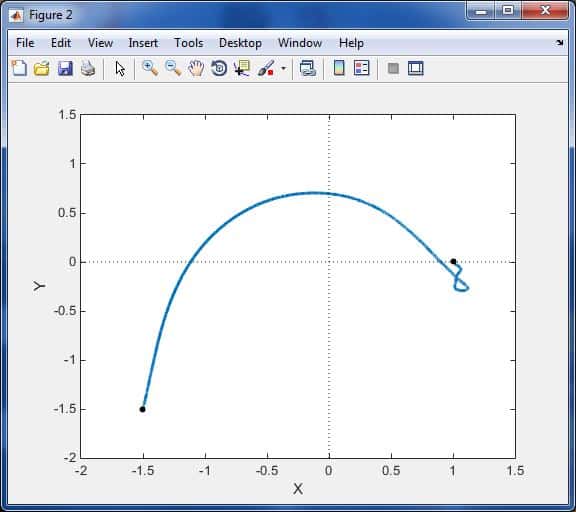
کنترل ردیاب بهینه بر روی ربات عمود پرواز چهار ملخه
۳۹۹,۰۰۰ تومان

دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.