

پاسخ سیستم آونگ وارون با pid controller و کنترل کننده lqr
23 شهریور 1396
بررسی پاسخ ارتعاشی یک سیستم پنج درجه آزادی به ورودی های پله و ضربه،نویز سفید،سینوسی
20 مهر 1396
کنترل بهینه حلقه بسته برای سیستم خطی با تأخیر برابر در ورودی و حالت سیستم
کنترل بهینه حلقه بسته برای سیستم خطی با تأخیر برابر در ورودی و حالت سیستم
بر اساس مقاله
Aclosed-form optimal control for linear systems with equal state and input delays
Michael Basin∗, Jesus Rodriguez-Gonzalez
سال انتشار: 2005
به همراه فایل گزارش و پاورپوینت ارائه
پروژه کنترل بهینه
سیستم های تاخیردار
۳۹۹,۰۰۰ تومان
کنترل بهینه حلقه بسته برای سیستم خطی با تأخیر برابر در ورودی و حالت سیستم
بر اساس مقاله
Aclosed-form optimal control for linear systems with equal state and input delays
Michael Basin∗, Jesus Rodriguez-Gonzalez
سال انتشار: 2005
به همراه فایل گزارش و پاورپوینت ارائه
پروژه کنترل بهینه
سیستم های تاخیردار
چکیده
این مقاله یک تثبیت کننده بهینه برای سیستم خطی با تأخیر برابر در حالت و ورودی کنترل ارائه میدهد. عملکرد کنترل بهینه بدست آمده با تثبیت کنندههای موجود که برای سیستمهای بدون تأخیر هستند مقایسه میشود و با مثالهایی به روشنی این مقایسه را تصدیق میکند. همچنین این مقاله شامل شکلهای شبیه سازی برای تأیید کارایی بهتر این تثبیت کننده بهینه است.
1- مقدمه
هرچند کنترل بهینه برای سیستمهای خطی حل شده است، اما برای سیستمهای خطی با تأخیر هنوز باز است(بسته به نوع تأخیر، معادلات سیستم و تابع هزینه). کتابهای مرجع کاملی در این زمینه وجود دارد که درباره بیشترین اصل بحث میکند (Kharatashvili,1967) یا روش برنامه ریزی پویا (Oguztoreli, 1966) برای سیستمهای با تأخیر که یک فرم مخصوص صریح برای تابع کنترل بهینه پیدا میکنند و البته کار پیچیدهای است. یک فرم خاص تابع هزینه نیز باید انتخاب شود. مطالعات بیشتر روی بهینه سازی زمان است(مقاله (Oguztoreli, 1963) برای سیستم خطی را ببینید) یا مربعی آن(Eller, Aggarwal, & Banks, 1969). همچنین یک تاریخچه قابل توجه مرتبط با کنترل مقاوم برای سیستمهای متغییر با زمان وجود دارد (Dugard & Verriest,1998; Mahmoud, 2000).
این مقاله بر روی حل مسئله کنترل بهینه برای سیستم با تأخیر برابر در حالت و ورودی کنترل و تابع هزینه مربعی تمرکز دارد. حل مسئله کنترل بهینه حالت در فرم حلقه بسته بدست آمده(مثل قانون فیدبک حالت خطی) که یک معادله دیفرانسیل معمولی(ریکاتی) بدون آرگومان تأخیر و مستقل از حالت سیستم را به دست میآورد. کنترل بهینه بدست آمده مجهز است به بهینه سازی عمومی برای سیستمهای تأخیری. از دو معادله استفاده میکند یکی معادله دیفرانسیل تأخیری برای حالت و یک معادله دیفرانسیل معمولی برای ماتریس بهره حالت. فضای حالت سیستم تأخیری یک بینهایت بعدی است (Malek-Zavarei & Jashmidi, 1987) که منفعت قابل توجهی دارد.
سرانجام عملکرد کنترل بهینه برای سیستم خطی با تأخیر برابر در حالت و ورودی و تابع هزینه مربعی با استفاده از مثالی با تثبیت کنندههای موجود برای سیستمهای بدون تأخیر مقایسه میشود. علاوه بر این این کنترل بهینه مقایسه شده با بهترین تثبیت کننده خطی بر اساس یک تقریب منطقی از سیستم تأخیری. در این مورد شبیه سازی نشان میدهد تثبیت کننده بر اساس تقریب ابعاد مسئله را زیاد میکند. محاسبات را پیچیده میکند و همچنین مقادیر رضایت بخشی نمیدهد.
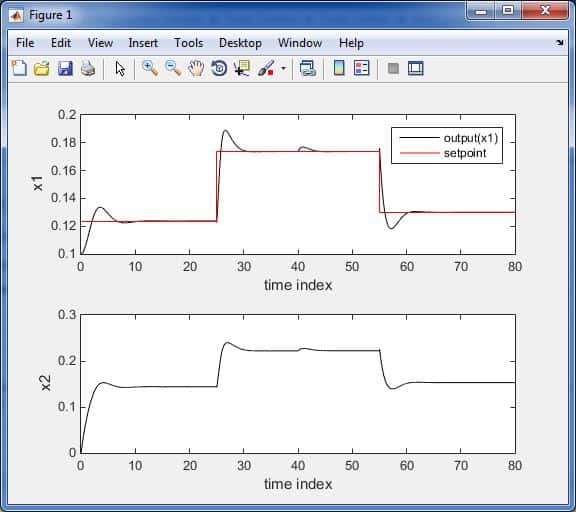
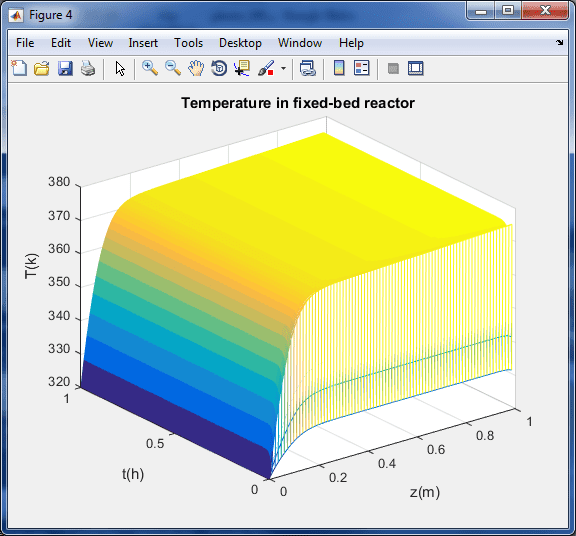
این مقاله به صورت زیر سازماندهی شده است. قسمت 2 سیاست کنترل بهینه برای سیستم خطی با تأخیر برابر در حالت و ورودی را توضیح میدهد. حل کنترل بهینه در قسمت 3 داده شده است. اثبات نتایج بدست آمده بر اساس بیشترین اصل در قسمت ضمیمه آمده است. قسمت 4 مثالی ارائه میدهد برای به تصویر کشیدن کنترل بهینه با تأخیر مساوی در حالت و ورودی در مقایسه با تثبیت کننده سیستم خطی بدون تأخیر و همچنین تقریب منطقی از سیستم اصلی با تأخیر به سیستم بدون تأخیر. شکلهای حاصل مقایسه بهتری از این سه حالت را نشان خواهد داد.
محصولات مشابه
-
تمرین باله روی صحنه – ادگار دگا – ۷۰۵۲
۵۸۹,۰۰۰ تومان

دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.