

پروژه کنترل بهینه | مقاوم سازی کنترلر LQR با روش دسته صفحات
29 مرداد 1396
ترجمه مقاله Optimal Tracking Controller Design for A Small Scale Helicopter
29 مرداد 1396



کنترل ردیاب بهینه بر روی ربات عمود پرواز چهار ملخه
۳۹۹,۰۰۰ تومان
پروژه پیاده سازی کنترل ردیاب بهینه بر روی ربات عمود پرواز چهار ملخه
قابل ارائه به عنوان
پروژه آموزشی کنترل بهینه
پروژه آموزشی کنترل غیرخطی
پروژه آموزشی شناسایی سیستم ها
به همراه فایل ورد گزارش و توضیح پروژه (پی دی اف)، شبیه سازی های متلب و پاورپوینت ارائه
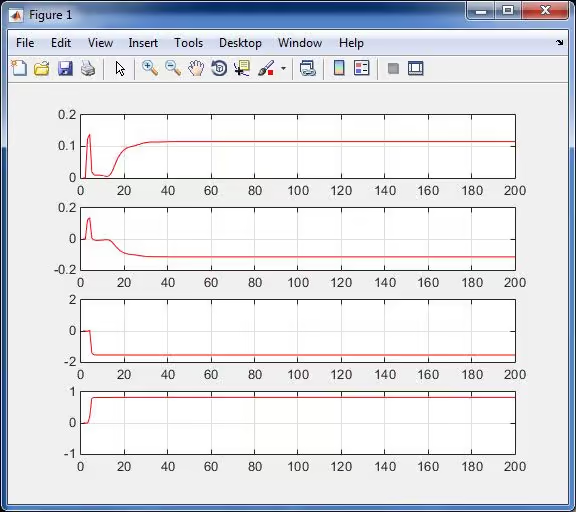
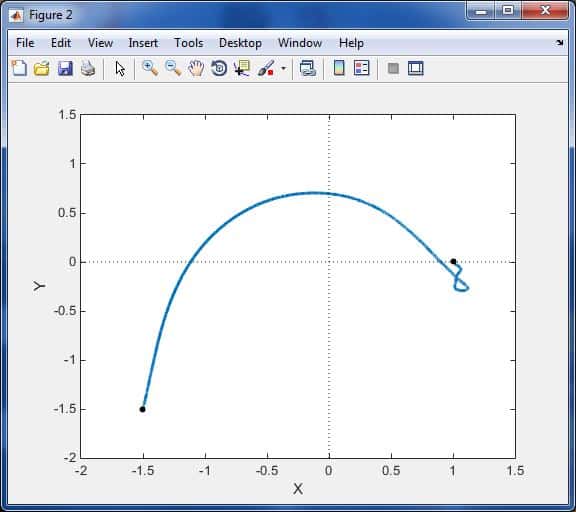
در این پروژه سعی بر آن داریم تا کنترل ردیاب بهینه را بر روی ربات عمود پرواز چهار ملخه[1] پیاده سازی کنیم.
فهرست مطالب
فهرست شکلها 1
فصل 1- مقدمه 1
فصل 2- پیاده سازی کنترل ردیاب بهینه. 2
2-1- شناسایی مدل ربات… 2
2-2- طراحی کنترلر ردیاب بهینه به صورت تئوری.. 4
2-2-1- طراحی روئیتگر. 4
2-2-2- طراحی کنترل کننده 6
2-3- پیاده سازی روی ربات… 9
فصل 3- کدهای نوشته شه به زبان C. 11
به این مطلب چند ستاره میدهید؟
(تعداد رای: 1 - امتیاز میانگین: 5)
محصولات مشابه
-
کنترل سرعت موتور DC با PID بهینه
۳۹۹,۰۰۰ تومان
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.