
پروژه درس اتوماسیون صنعتی شبکه های حسگر بی سیم و کاربردهای آن
9 شهریور 1396کنترل بهینه حلقه بسته برای سیستم خطی با تأخیر برابر در ورودی و حالت سیستم
23 شهریور 1396
پاسخ سیستم آونگ وارون با pid controller و کنترل کننده lqr
پروژه کنترل بهینه
بر اساس مقاله
Optimal Control of Nonlinear Inverted Pendulum System Using PID Controller and LQR: Performance Analysis Without and With Disturbance Input
سال انتشار: 2014
به همراه گزارش اجمالی راهنمای اجرای کد در 11 صفحه
۲۳۹,۰۰۰ تومان
پروژه آموزشی کنترل بهینه
بر اساس مقاله
Optimal Control of Nonlinear Inverted Pendulum System Using PID Controller and LQR: Performance Analysis Without and With Disturbance Input
سال انتشار: 2014
به همراه گزارش اجمالی راهنمای اجرای کد در 11 صفحه
به این مطلب چند ستاره میدهید؟
(تعداد رای: 1 - امتیاز میانگین: 5)
محصولات مشابه
-
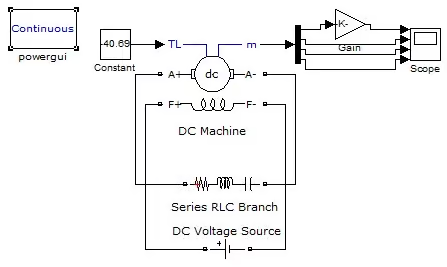
شبیه سازی ژنراتور DC در محیط سیمولینک
۲۲۹,۰۰۰ تومان
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.