

تمرین باله روی صحنه – ادگار دگا – ۷۰۵۲
2 شهریور 1396کنترل کامیون باری با استفاده از کنترل کننده فازی
2 شهریور 1396
طراحی کنترلر تطبیقی برای سیستم غیرخطی مرتبه یک با بروزرسانی مبتنی بر پایداری لیاپانوف
پروژه شبکه عصبی
پروژه کنترل تطبیقی
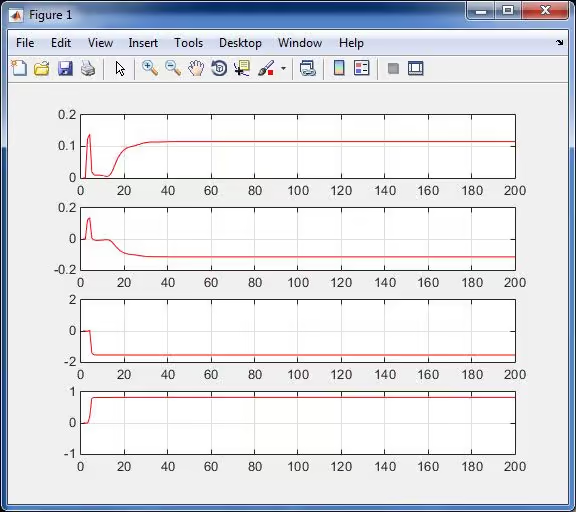
طراحی کنترلر تطبیقی برای سیستم غیرخطی مرتبه یک با بروزرسانی مبتنی بر پایداری لیاپانوف
به همراه 20 صفحه گزارش و فایلهای شبیه سازی در متلب ارائه در دانشگاه صنعتی خواجه نصیرالدین توسی – استاد درس دکتر محمد تشنه لب
بر اساس مقاله زیر، شبیه سازی مقاله زیر
Adaptive neural network control for strict-feedback nonlinear systems using backstepping design
سال انتشار مقاله:
۲۶۹,۰۰۰ تومان
بر اساس مقاله زیر، شبیه سازی مقاله زیر
Adaptive neural network control for strict-feedback nonlinear systems using backstepping design
به این مطلب چند ستاره میدهید؟
(تعداد رای: 0 - امتیاز میانگین: 0)
محصولات مشابه
-
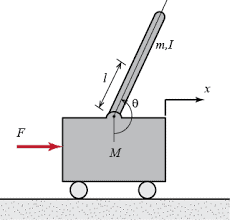
کنترل کامیون باری با استفاده از کنترل کننده فازی
۱۶۹,۰۰۰ تومان -
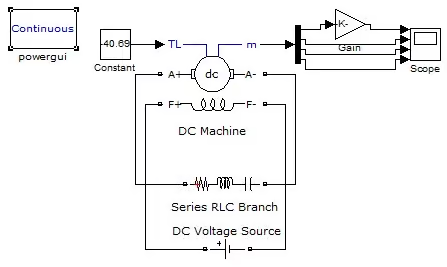
شبیه سازی ژنراتور DC در محیط سیمولینک
۲۲۹,۰۰۰ تومان
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.